Hardware
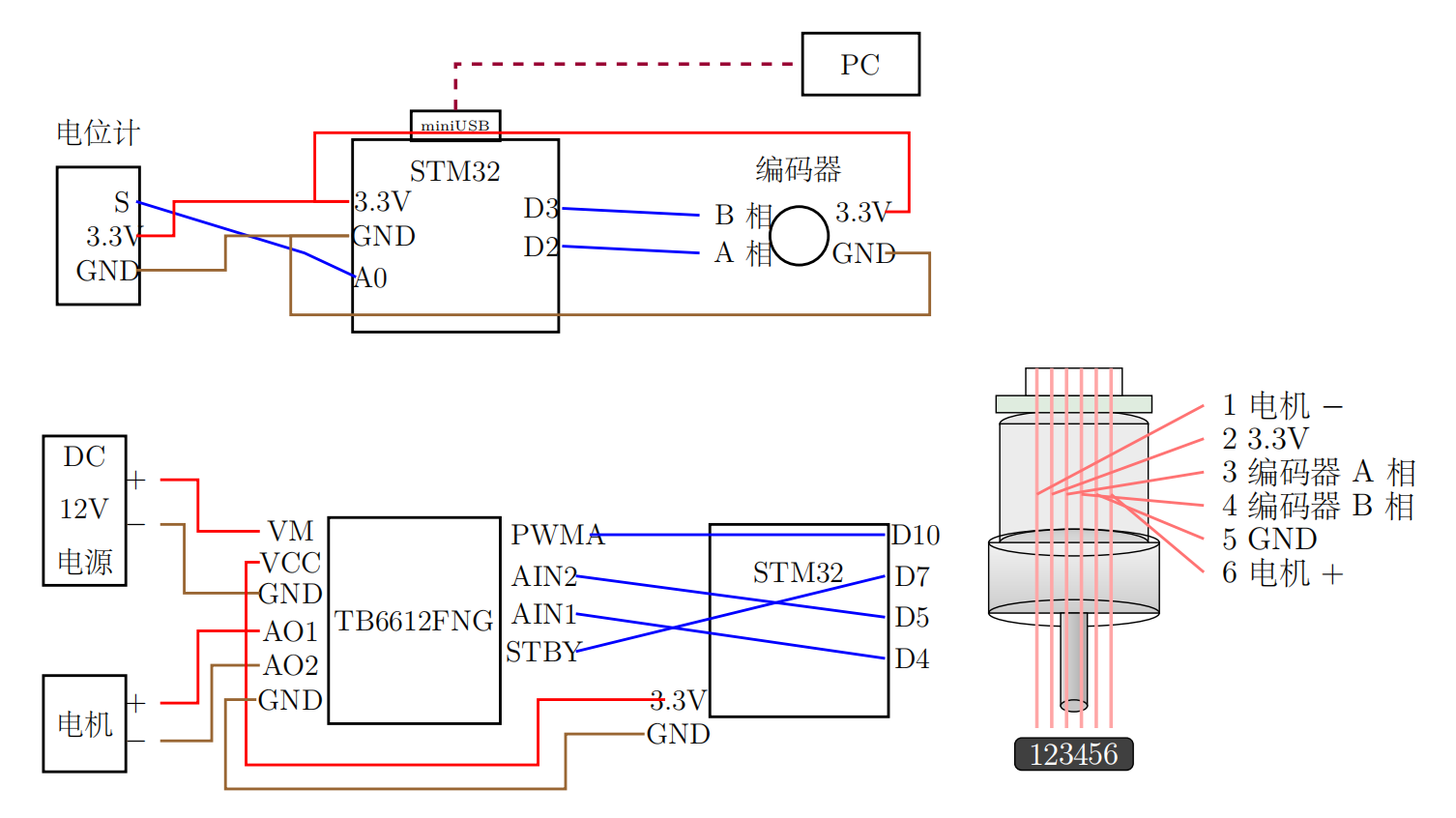
Core RIP platform
Rotary inverted pendulum system with STM32F446RE MCU, TB6612FNG motor driver, DC motor, potentiometer, incremental encoder, 12V power input, and PC serial logging.
STM32F446RE
TB6612FNG
Encoder
Potentiometer